

Variational Autoencoder (VAE)
December 31, 2022 27 min read
Here I discuss one of the two most popular classes of generative models for creating images.
Generative models in machine learning are capable of looking at a set of data points (e.g. images), capturing some inner structure in them and producing new data points (e.g. new images), which bear the properties of the training data set.
Since its inception in the late 2013 Variational Autoencoder (VAE) has become one of two most popular generative models for producing photorealistic images. A popular alternative is called Generative Adversarial Networks (GANs), they are beyond the scope of this post.
To understand the ideas behind VAE, first we need to understand regular autoencoders. To understand motivation for both regular autoencoders and VAE, we need some background in information theory. For understanding VAE we will also cover some background in Bayesian machine learning.
Information theory: entropy, mutual information and KL-divergence
In 1940-1950 information theorists such as Claude Shannon posed a set of problems, related to finding the most economical ways of data transmission.
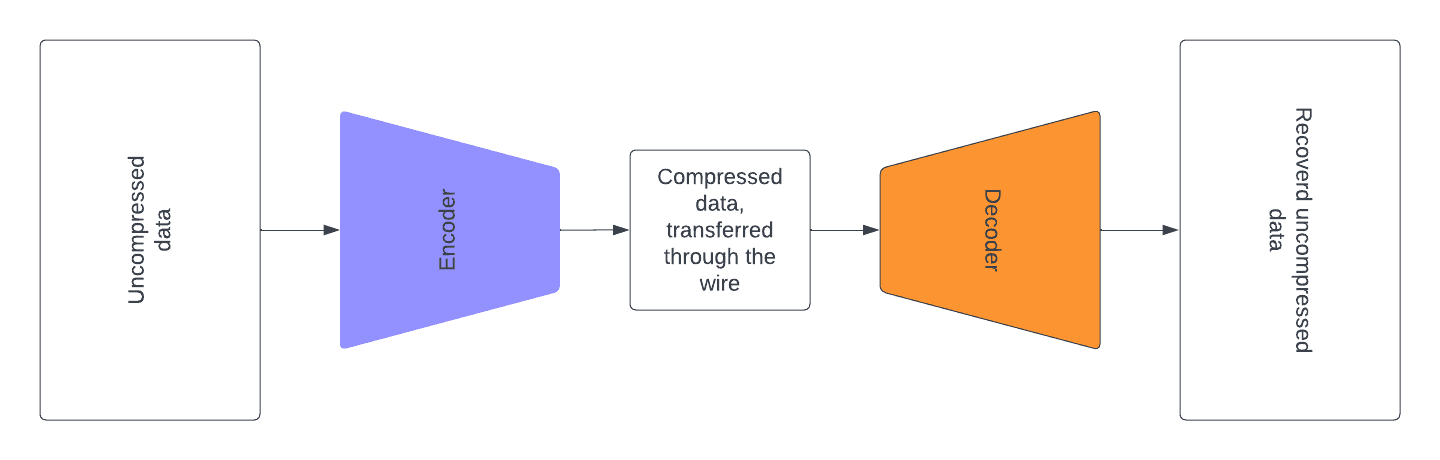
Suppose that you have a signal (e.g. long text in English), and you need to transmit it through a channel (e.g. wire) with a severely limited bandwidth. It would be beneficial to compress this signal, using some kind of encoding, before transferring it through the wire, so that we make as good use of our data transfer channel, as possible. The receiving side should decompress the signal after receiving it.
Suppose that you encode each letter of your alphabet with a sequence of 0s and 1s. What is the optimal way to encode each the letters?
It is intuitive that if you encode frequent letters with the shortest sequences and non-frequent letters with remaining (longer) sequences, you’ll get an optimal encoding. Consider the following example of an alphabet and an optimal encoding:
| Letter | Letter code | Frequency | Length of letter code |
|---|---|---|---|
| A | 0 | 0.5 | 1 |
| B | 10 | 0.25 | 2 |
| C | 110 | 0.125 | 3 |
| D | 111 | 0.125 | 3 |
Observe that the length of the code of letter equals to .
If your alphabet has a distribution , e.g. , the optimal encoding of your signal would achieve the minimal length of average text, if .
is called entropy, as previously this function was introduced in physical chemistry by Ludwig Boltzmann to describe a different process.
Now, if you use an encoding with a different distribution of letter codes to transfer your signal, this encoding would be sub-optimal, as average length of a letter would be .
The difference in length between the optimal encoding and sub-optimal encoding is then .
This quantity is called Kullback-Liebler divergence, and for encoding to be optimal it should be minimal. As entropy does not depend on , it would suffice to optimize , this quantity is known as Cross entropy.
Autoencoders
Inspired by information theory, machine learning practitioners employed the concept of Autoencoders.
To the best of my knowledge first publication on autoencoders or autoassociative neural networks was written by Mark Kramer in 1991, where autoencoders were seen as a non-linear dimensionality reduction tool, a non-linear analogue of PCA.
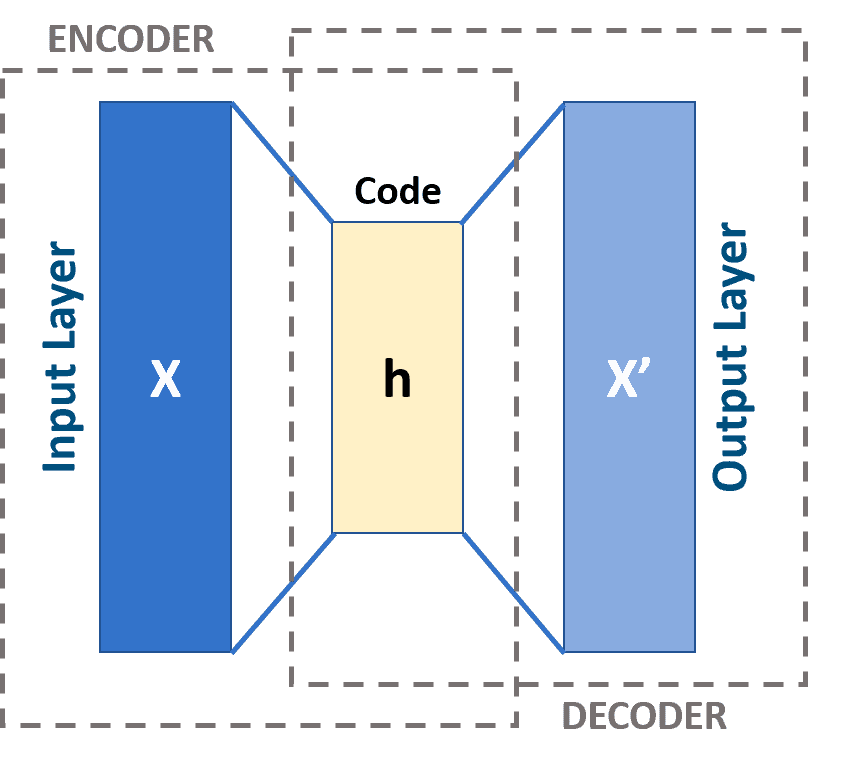
The logic of autoencoder is to train such encoder and decoder neural networks that encoder can compress the high-dimensional input data to a low-dimensional latent representation (or on the image below) and then the decoder is able to reconstruct (or on the image below) accurately enough from this latent representation.
This approach was re-used much later, circa 2010, by Yoshua Bengio group. They figured out that autoencoders can be used for other purposes, such as denoising:
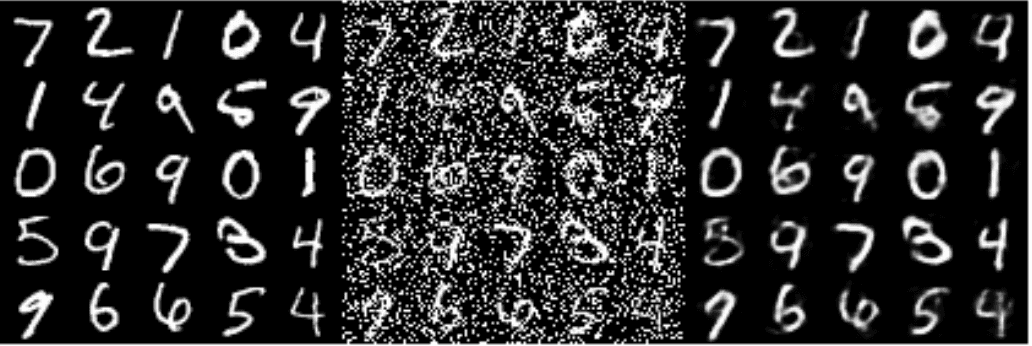
Moreover, Bengio borrowed the idea of stacking individual encoders/decoders from Hinton’s RBMs and this approach gave rise to stacked denoising autoencoders and, eventually, Diffusion models, but that’s a topic for another day.
Holes in the latent space
Now, what happens, if we drop the decoder part, just sample a random point from the encoder latent space and generate an output from it with the decoder? This is supposed to give us an image. Hence, our model would be generative.
However, one of the arising problems is the fact that data points in our training dataset oftentimes do not cover the whole latent space. In the worst-case scenario theoretically our autoencoder could just map all the data points to a straight line, effectively enumerating them.
Thus, if we wanted to generate an image and sampled a point from the latent space that belongs to a hole, we won’t get a valid output. So, we face a problem: we have to come up with a way to regularize our latent space, so that the whole manifold of images is mapped to the whole latent space, preferably in a smooth way. This is the motivation for VAE.
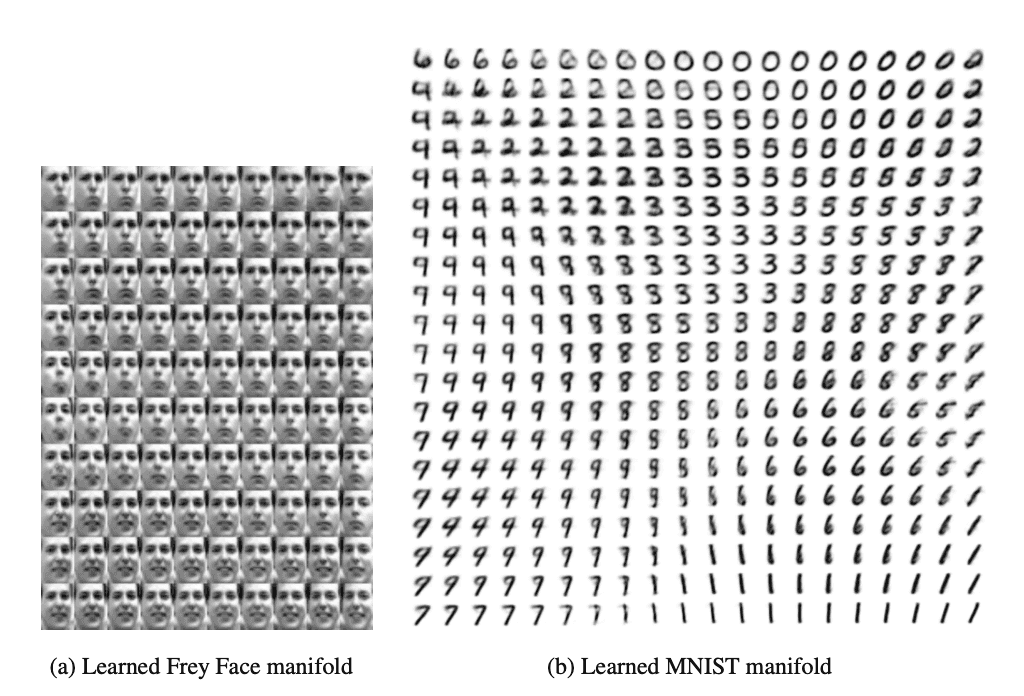
VAE makes sure that the latent space has a Gaussian distribution, so that by gradually moving from one point of latent space to its neighbour, we get a meaningful gradually changing output:
Variational autoencoder (VAE)
VAE, devised by Max Welling group in the late 2013, has arguably become the most wide-spread flavour of autoencoders. It maps the data points to a distribution (usually, Gaussian), so that the mapping is smooth and no holes are produced. It is formulated in Bayesian terms.
The idea of this approach starts from the information theory perspective: we want to train such an encoder neural network with parameters that the Kullback-Liebler divergence between the input image and its latent representation is minimized: .
This principle is also known as Infomax and was borrowed by Bengio and, later, Welling teams from one of the flavours of Independent Component Analysis (ICA).
Computationally VAE minimizes the divergence using stochastic gradient descent. However, as we’ll see later using a regular neural network training approach does not get the job done, as normal gradient estimator has a very high variance and does not converge computationally (we’ll see this in a moment).
Hence, training VAE employs a specific computational technique, called doubly-stochastic gradient descent and a special trick, called re-parametrization trick, which we will explore later.
But first we need to understand the language, in which VAE is described, as it is a Bayesian model, and we will have to cover a lot of background in Bayesian ML.
Bayes formula
To explain the Bayesian framework, employed by VAE, we have to start with Bayes formula:
In case of VAE the notation is as follows:
- we have a dataset of images
- each input image is denoted
- its latent representation, which is generated by VAE’s encoder half, is denoted
- the weights of encoder network are denoted ; Kingma and Welling call them variational parameters
- the weights of decoder network are denoted ; Kingma and Welling call them generative parameters
The authors of VAE, D. Kingma and M. Welling, assume that there exists some prior distribution of latent parameters , from which latent representation of each data point is sampled. For each image we maximize the posterior .
Variational inference
Direct calculation of posterior using Bayes formula is impossible, as we need to calculate the probability of evidence , for which the integral is intractable (i.e. it is not possible to calculate it analytically or computationally in practice).
So we need to come up with a practical way of overcoming this obstacle.
Typically, Bayesians have two solutions for problems like this: one solution is Markov Chain Monte Carlo methods. In this particular case MCMC estimator is time-consuming and gradient, calculated with it, has a high variance, so the model fails to converge.
An alternative approach is Variational Inference approach, which we explain here.
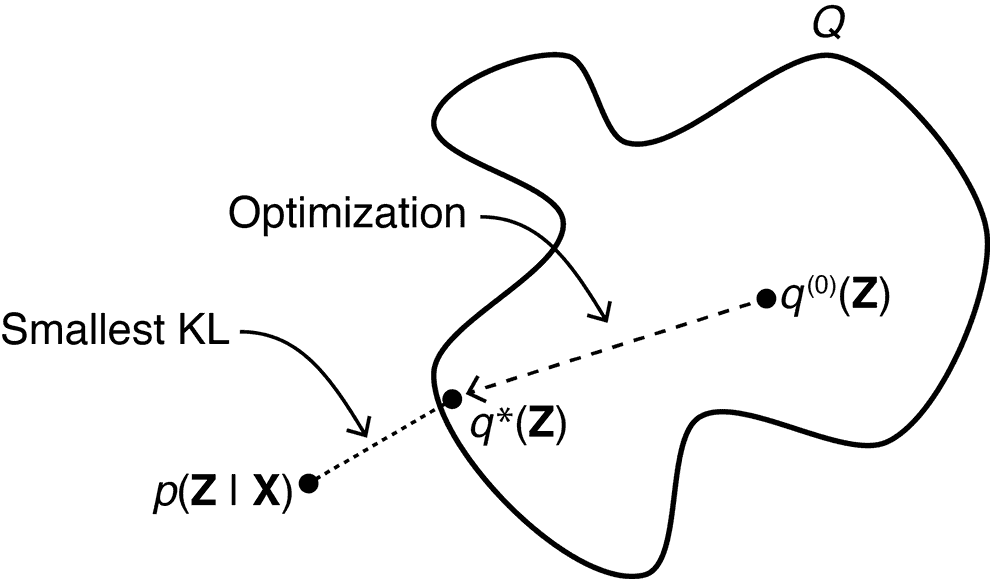
In variational inference we choose a class of functions , from which we will try to pick an approximation (called guide) of the posterior , such that Kullback-Liebler divergence between this approximation and true posterior is minimal.
ELBO maximization
Now, we need to come up with a technical way to find this optimal guide numerically.
Out of blue sky we consider . Let us do 2 tricks with it, first represent it as an integral, and then split it into 2 terms:
.
Now we see that log-evidence consists of two non-negative terms. Let us interpret them:
The first term is called Evidence Lower BOund (ELBO). The second term is our cost function , which Variational Inference aims to minimize. As log-evidence is fixed, the greater ELBO gets, the closer in terms of KL divergence guide approximates the posterior :
Hence, to find the optimal guide , in practice we have to maximize ELBO. Let us break it down further:
We see that our loss function consists of 2 terms. The first term characterizes the quality of reconstruction of image from its latent representation. The second term is a regularizer term that guarantees that our guide (i.e. latent space) distribution stays relatively close to the prior , which is usually chosen to be Gaussian.
VAE makes use of ELBO as its loss function for training. It approximates its true gradient with stochastic gradients over mini-batches of data points (e.g. images), so that integrals are replaced with sums.
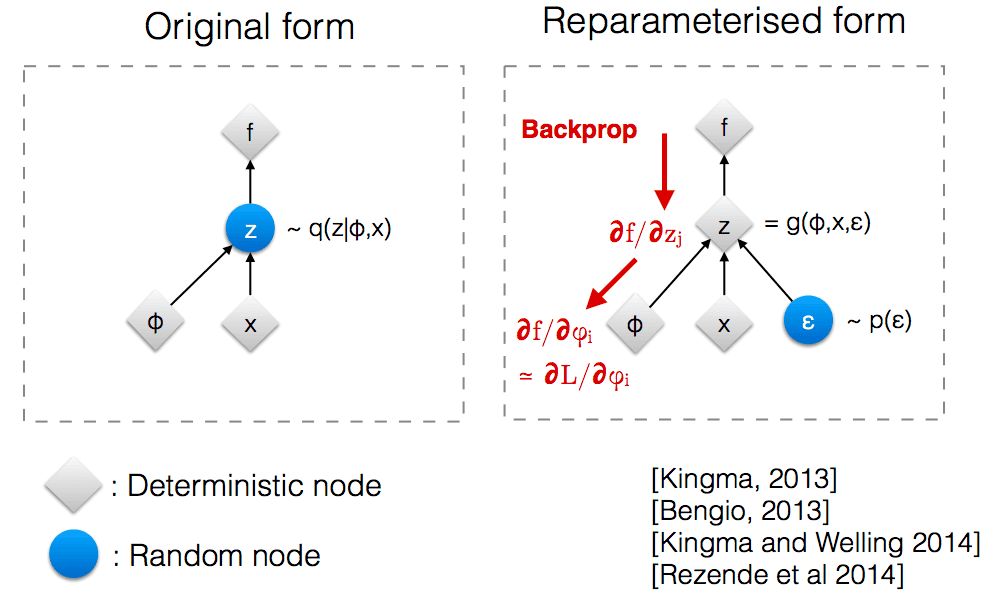
There is also one nitpick: in VAE our latent representation vector is not deterministic, but stochastic. Hence, in order to make the gradient of ELBO differentiable, we’ll have to use a special reparametrization trick.
Reparametrization trick
Unlike the normal convolutional neural networks, VAE makes use of doubly stochastic gradient descent. Input images are the first source of stochasticity in VAE.
But there is also a second source: in case of VAE the latent representation is not just a deterministic low-dimensional vector like in normal autoencoders. Instead, it is a random variable (usually, multivariate gaussian), whose mean and variance the model aims to learn.
So the mean and variance of are deterministic, but then for each data point in the training batch we sample a random point from that distribution, introducing some extra noise.
Why doing so?
There are 3 reasons, all technical.
First, as I mentioned previously, it is a practical way to achieve a gradient estimator that would actually converge. MCMC gradient estimator, used normally, would have too big of a variance, and training process fails to converge in practice.
Second, we need the parameters and to be differentiable in order to learn them via error backpropagation. Randomness wouldn’t be differentiable, but if we keep them deterministic, and inject randomness with a separate variable , it keeps and differentiable and lets the model learn them.
Third, the data points in the training set might not cover the whole latent space. Randomness helps to partially mitigate the issue of presense of holes in the latent space.
Practical implementation of loss and its gradients
Ok, now we’re done with Bayesian theory. It might by nice for drawing inspiration, but it is “more like guidelines, rather than actual rules”. Time to implement our loss and its gradient it in practice. Look at the loss function again:
First, let us interpret the terms. In case of VAE, our guide is the output of encoder neural network. As encoder output depends on variational parameters and input data , we will denote in case of VAE . We are searching for the guide in the form of a multivariate Gaussian: .
Second, corresponds to reconstruction of image from the latent representation by the decoder, so it is rather ; the term also depends on the decoder (generative) parameters , thus we shall denote it . Possible options for it are Bernoulli MLP and Gaussian MLP errors. I’d go with Gaussian - in that case reconstruction error takes the form of L2 error: .
Third, is a prior of latent representation, again, parametrized on variational (encoder) parameters . Prior is often assumed to be Gaussian with zero mean and identity matrix of variance:
So, we get:
.
Let us work with individual terms:
-
- this term depends on the choice of reconstruction error function. In case of Gaussian posterior it will look like an L2 norm, in case of Bernoulli - like cross-entropy.
-
-
In practice we are working with finite sets of points and are using Monte-Carlo estimators. Hence, adding the three terms together and replacing integrals with sums we get:
.
As I said before, in practice reconstruction quality term takes form of either L2 norm of difference between input and reconstructed image in case of Gaussian posterior , or cross-entropy in case of multivariate Bernoulli posterior .
Implementation
There is a nice repository on Github with various flavours of VAE, implemented in PyTorch. I’ve reproduced it, removing some of the optional abstraction layers.
First, let us define the configuration options for our VAE training:
config = {
'model_params': {
'name': 'VAE',
'in_channels': 3,
'latent_dim': 128
},
'data_params': {
'root_dir': "Data/celeba/",
'annotations_file_name': "list_eval_partition.csv",
'annotations_file_name': "list_eval_partition.csv",
'train_batch_size': 64,
'val_batch_size': 64,
'patch_size': 64,
'num_workers': 4
},
'exp_params': {
'LR': 0.005,
'weight_decay': 0.0,
'scheduler_gamma': 0.95,
'kld_weight': 0.00025,
'manual_seed': 1265
},
'trainer_params': {
# 'gpus': [1],
'max_epochs': 100
},
'logging_params': {
'save_dir': "logs/",
'name': "VAE"
}
}Second, let us set implement the VAE itself.
from typing import *
import torch
from torch import nn
class VAE(nn.Module):
"""Vanilla Variational Autoencoder (VAE) implementation.
Based on: https://github.com/AntixK/PyTorch-VAE.
"""
def __init__(self, in_channels: int, latent_space_dimension: int, hidden_layers_channels: List = None, **kwargs):
super(VAE, self).__init__()
if hidden_layers_channels is None:
self.hidden_layers_channels = [512, 256, 128, 64, 32]
else:
self.hidden_layers_channels = hidden_layers_channels
hidden_layers_channels_reversed = self.hidden_layers_channels[::-1]
self.latent_space_dimension = latent_space_dimension
# encoder
# -------
encoder_modules = []
current_in_channels = in_channels
for index, dim in enumerate(self.hidden_layers_channels):
encoder_modules.append(nn.Sequential(
nn.Conv2d(in_channels=current_in_channels, out_channels=dim, kernel_size=3, stride=2, padding=1),
nn.BatchNorm2d(self.hidden_layers_channels[index]),
nn.ReLU()
))
current_in_channels = dim
self.encoder = nn.Sequential(*encoder_modules)
# latent vector
# -------------
# Each convolutional layer of the encoder downscales the image, halving its dimensionality.
# Hence, by the time we reach latent layer, the image dimensionality is halved len(self.hidden_layers_channels) times.
self.downscaled_image_dimensionality = int(config['data_params']['patch_size'] / (2 ** len(self.hidden_layers_channels)))
self.mu = nn.Linear(self.hidden_layers_channels[-1] * (self.downscaled_image_dimensionality ** 2), self.latent_space_dimension)
self.log_var = nn.Linear(self.hidden_layers_channels[-1] * (self.downscaled_image_dimensionality ** 2), self.latent_space_dimension)
# decoder
# -------
self.decoder_input = nn.Linear(self.latent_space_dimension, self.hidden_layers_channels[-1] * (self.downscaled_image_dimensionality ** 2)) # feed-forward layer, converting latent space vector into the first hidden layer of decoder
decoder_modules = []
current_in_channels = self.hidden_layers_channels[-1]
for index, dim in enumerate(hidden_layers_channels_reversed):
decoder_modules.append(nn.Sequential(
nn.ConvTranspose2d(in_channels=current_in_channels, out_channels=dim, kernel_size=3, stride=2, padding=1, output_padding=1),
nn.BatchNorm2d(dim),
nn.ReLU(),
))
current_in_channels = dim
self.decoder = nn.Sequential(*decoder_modules)
# output layer
# ------------
self.final_layer = nn.Sequential(
nn.Conv2d(self.hidden_layers_channels[0], out_channels=3, kernel_size=3, padding=1)
)
def encode(self, input: torch.Tensor) -> List[torch.Tensor]:
"""Generates a latent representation vector from an input."""
result = self.encoder(input)
result = torch.flatten(result, start_dim=1)
mu = self.mu(result)
log_var = self.log_var(result)
return [mu, log_var]
def decode(self, latent_vector: torch.Tensor, batch_size: int) -> torch.Tensor:
"""Re-constructs an input from a latent representation."""
result = self.decoder_input(latent_vector)
# result = result.view(-1, 512, 2, 2)
result = result.view(batch_size, self.hidden_layers_channels[-1], self.downscaled_image_dimensionality, self.downscaled_image_dimensionality)
result = self.decoder(result)
#print(f"decode() decoder result.size() = {result.size()}")
result = self.final_layer(result)
return result
def reparametrize(self, mu: torch.Tensor, log_var: torch.Tensor):
"""Re-parametrization trick implementation. We sample N(mu, var) using N(0, 1)."""
std = torch.exp(0.5 * log_var)
eps = torch.randn_like(std)
return eps * std + mu
def forward(self, input: torch.Tensor, **kwargs) -> List[torch.Tensor]:
mu, log_var = self.encode(input)
z = self.reparametrize(mu, log_var)
batch_size = input.size()[0]
return [self.decode(z, batch_size), input, mu, log_var]
def loss_function(self, *args, **kwargs) -> dict:
"""
VAE loss, consisting of 2 terms, reconstruction term and regularization term
KL(N(\mu, \sigma), N(0, 1)) = \log \frac{1}{\sigma} + \frac{\sigma^2 + \mu^2}{2} - \frac{1}{2}.
"""
recons = args[0]
input = args[1]
mu = args[2]
log_var = args[3]
kld_weight = kwargs['M_N'] # Account for the minibatch samples from the dataset
reconstruction_loss = nn.functional.mse_loss(recons, input)
kld_loss = torch.mean(-0.5 * torch.sum(1 + log_var - mu ** 2 - log_var.exp(), dim = 1), dim = 0)
loss = reconstruction_loss + kld_weight * kld_loss
return {
'loss': loss,
'Reconstruction loss': reconstruction_loss.detach(),
'Regularization loss': -kld_loss.detach()
}
def sample(self, batch_size: int, current_device: int, **kwargs):
"""Samples a batch of random points (vectors) from the latent space
and generates a batch of output images from it."""
z = torch.randn(batch_size, self.latent_space_dimension)
z = z.to(current_device)
samples = self.decode(z, batch_size)
return samples
def generate(self, latent_vector: torch.Tensor):
"""Given an input latent space vector, generates an output form it."""
return self.forward(latent_vector)[0]We shall train our VAE to synthesize new human faces. I am using CelebA dataset as the basis. For some reason Torchvision
wrapper around it failed to load from the Google Drive for me, so I’ve manually downloaded the dataset from Kaggle and
written my own version of it with kaggle datasets download -d jessicali9530/celeba-dataset command and unzipped it in
/Data/celeba folder of my jupyter lab workspace:
import os
# from torchvision.datasets import CelebA - failed to load from google drive
from torch.utils.data import Dataset
from torchvision import transforms
import pandas as pd
from skimage import io
from PIL import Image
transform = transforms.Compose([
transforms.RandomHorizontalFlip(),
transforms.CenterCrop(148),
transforms.Resize(config['data_params']['patch_size']),
transforms.ToTensor()
])
class CelebADataset(Dataset):
"""A manually-written wrapper around CelebA dataset, downloaded from Kaggle.
Kaggle: https://www.kaggle.com/datasets/jessicali9530/celeba-dataset?resource=download
Docs: https://pytorch.org/tutorials/beginner/data_loading_tutorial.html
Download the folder from Kaggle and put it into Data/ folder.
"""
def __init__(
self,
partition_file: str = 'Data/celeba/list_eval_partition.csv',
root_dir: str = 'Data/celeba/img_align_celeba/img_align_celeba',
transform=transform,
split: str = "train"
):
super(CelebADataset, self).__init__()
self.partitions = pd.read_csv(partition_file)
self.root_dir = root_dir
self.transform = transform
self.split = split
def split_to_index(self):
if self.split == "train":
split_index = 0
elif self.split == "validation":
split_index = 1
elif self.split == "test":
split_index = 2
else:
raise ValueError(f"Unknown pratition type: {partition}")
return split_index
def __len__(self):
split_index = self.split_to_index()
data_in_split = self.partitions[self.partitions['partition'] == split_index]
return len(data_in_split)
def __getitem__(self, idx):
if torch.is_tensor(idx):
idx = idx.tolist()
# get index of dataset partition
split_index = self.split_to_index()
# fetch the sample, transform it and return the result
img_name = os.path.join(self.root_dir, self.partitions[self.partitions['partition'] == split_index].iloc[idx, 0])
image = Image.open(img_name)
if self.transform:
image = self.transform(image)
return image
# Load the dataset from file and apply transformations
celeba_dataset = CelebADataset()Wrap this dataset into a LightningDataModule abstraction:
from pytorch_lightning import LightningDataModule
from torch.utils.data import DataLoader
# Create a torch dataloader for testing purposes
# ----------------------------------------------
if torch.backends.mps.is_available():
device = torch.device("mps")
elif torch.cuda.is_available():
device = torch.device("cuda")
else:
device = torch.device("cpu")
celeba_dataloader = torch.utils.data.DataLoader(
celeba_dataset,
batch_size=config['data_params']['train_batch_size'],
num_workers=0 if device.type == 'cuda' else 2,
pin_memory=True if device.type == 'cuda' else False,
shuffle=True
)
# Wrap into LightningDataModule
# -----------------------------
class CelebADataModule(LightningDataModule):
def __init__(
self,
train_batch_size: int = 8,
val_batch_size: int = 8,
patch_size: Union[int, Sequence[int]] = (256, 256),
num_workers: int = 0,
pin_memory: bool = False,
**kwargs,
):
super(CelebADataModule, self).__init__()
self.train_batch_size = train_batch_size
self.val_batch_size = val_batch_size
self.patch_size = patch_size
self.num_workers = num_workers
self.pin_memory = pin_memory
def setup(self, stage: Optional[str] = None) -> None:
self.train_dataset = CelebADataset(split='train')
self.val_dataset = CelebADataset(split='test')
def train_dataloader(self) -> DataLoader:
return DataLoader(
self.train_dataset,
batch_size=self.train_batch_size,
num_workers=self.num_workers,
shuffle=True,
pin_memory=self.pin_memory,
)
def val_dataloader(self) -> DataLoader:
return DataLoader(
self.val_dataset,
batch_size=self.val_batch_size,
num_workers=self.num_workers,
shuffle=False,
pin_memory=self.pin_memory,
)
def test_dataloader(self) -> DataLoader:
return DataLoader(
self.val_dataset,
batch_size=144,
num_workers=self.num_workers,
shuffle=True,
pin_memory=self.pin_memory,
)Almost there. Now we configure our Torch Lightning experiment and trainer. Experiment code:
import pytorch_lightning as pl
from torchvision import transforms
import torchvision.utils as vutils
from torchvision.datasets import CelebA
from torch.utils.data import DataLoader
class Experiment(pl.LightningModule):
def __init__(self, params: dict, model: nn.Module) -> None:
super(Experiment, self).__init__()
self.params = params
self.model = model
def forward(self, input: torch.Tensor, **kwargs) -> torch.Tensor:
return self.model.forward(input, **kwargs)
def training_step(self, batch, batch_idx, optimizer_idx=0):
real_images = batch
self.curr_device = real_images.device
results = self.forward(real_images)
train_loss = self.model.loss_function(
*results,
M_N = self.params['kld_weight'], #al_img.shape[0]/ self.num_train_imgs,
optimizer_idx=optimizer_idx,
batch_idx=batch_idx
)
self.log_dict({key: val.item() for key, val in train_loss.items()}, sync_dist=True)
return train_loss['loss']
def validaiton_step(self, batch, batch_idx, optimizer_idx=0):
real_images = batch
self.curr_device = real_images.device
results = self.forward(real_images)
validation_loss = self.model.loss_function(
*results,
M_N = 1.0, #real_images.shape[0] / self.num_val_imgs,
optimizer_idx = optimizer_idx,
batch_idx = batch_idx
)
self.log_dict({f"val_{key}": val.item() for key, val in val_loss.items()}, sync_dist=True)
def on_validation_end(self) -> None:
self.sample_images()
def sample_images(self):
test_input, test_label = next(iter(self.trainer.datamodule.test_dataloader()))
test_input = test_input.to(self.current_device)
test_label = test_label.to(self.current_device)
reconstructions = self.model.generate(test_input, labels=test_label)
vutils.save_image(
reconstructions.data,
os.path.join(self.logger.log_dir, "Reconstructions", f"reconstruction_{self.logger.name}_Epoch_{self.current_epoch}.png"),
normalize=True,
nrow=12
)
try:
samples = self.model.sample(144, self.curr_device, labels=test_label)
vutils.save_image(
samples.cpu().data,
os.path.join(self.logger.log_dir, "Samples", f"{self.logger.name}_Epoch_{self.current_epoch}.png"),
normalize=True,
nrow=12
)
except Warning:
pass
def configure_optimizers(self):
optimizers = []
schedulers = []
optimizer = torch.optim.Adam(self.model.parameters(), lr=self.params['LR'], weight_decay=self.params['weight_decay'])
optimizers.append(optimizer)
if self.params['scheduler_gamma'] is not None:
scheduler = torch.optim.lr_scheduler.ExponentialLR(optimizers[0], gamma = self.params['scheduler_gamma'])
schedulers.append(scheduler)
return optimizers, schedulers
else:
return optimizersNow we can finally configure the trainer and run our training procedure:
from pytorch_lightning import Trainer
from pytorch_lightning.loggers import TensorBoardLogger
from pytorch_lightning.callbacks import LearningRateMonitor, ModelCheckpoint
from torch.nn.parallel import DistributedDataParallel as DDP
from pytorch_lightning.strategies import DDPStrategy
model = VAE(in_channels=config['model_params']['in_channels'], latent_space_dimension=config['model_params']['latent_dim'])
experiment = Experiment(config['exp_params'], model)
tb_logger = TensorBoardLogger(
save_dir=config['logging_params']['save_dir'],
name=config['model_params']['name']
)
data_module = CelebADataModule()
trainer = Trainer(
logger=tb_logger,
callbacks=[
LearningRateMonitor(),
ModelCheckpoint(
save_top_k=2,
dirpath=os.path.join(tb_logger.log_dir , "checkpoints"),
monitor="val_loss",
save_last=True
),
],
accelerator="mps", #'cpu', 'cude'
devices=1,
# strategy='single_device', #'ddp_notebook',
**config['trainer_params']
)
trainer.fit(experiment, datamodule=data_module)Ok, now if we train the model for even a few epochs, it will learn to generate decently looking human faces:
import torchvision.transforms as T
samples = model.sample(batch_size=4, current_device=torch.device("cuda:0"))
for sample in samples:
transform = T.ToPILImage()
image = transform(sample)
image.show()




Problems and improvements of VAE
Fuzzy results
A well-known issue with output images, generated by VAE decoder, is the fact that oftentimes they are blurred.
How to explain this phenomenon? Consider latent space of a VAE, trained to recognized MNIST digits:
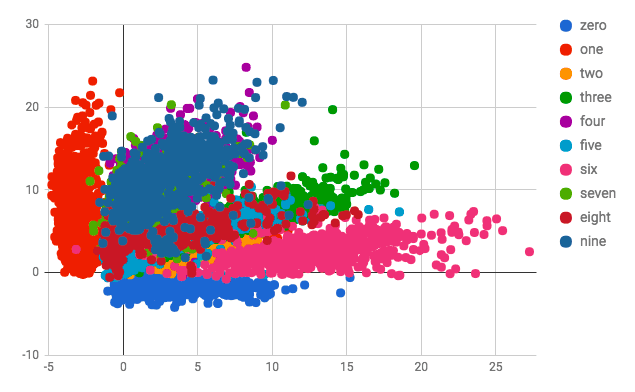
Some classes (e.g. fours and nines) intersect with each other. If you sample a point from a region of latent space, where both fours and nines are frequent, VAE would basically produce a superposition of nine and four. This results in such a blurry image.
Posterior collapse
There are plenty of other issues left with regularization of the latent space of VAE.
For instance, sometimes generative part of VAE almost ignores the input image and generates a very generic image, very dissimilar from the input. This phenomenon is called posterior collapse.
Some authors claim that this happens when the regularization term of VAE (that moves prior on closer to Gaussian) takes over the reconstruction term. Basically, reconstruction term conflicts with regularization term, and if regularization term wins, input image is ignored by VAE to a significant extent. Hence, one might want to introduce some weight (often denoted like regularization strength in ridge regression), which would re-balance the impacts of reconstruction and regularization terms in VAE loss.
Another reason, possibly contributing to the posterior collapse, is the fact that variance of the Gaussian distribution, used in VAE, is diagonal, while in the real distribution the coordinates might not be independent.
This gave rise to dozens of flavours of VAE, which address these and other issues, such as beta VAE, vector quantization VAE (VQ-VAE) and other, which I won’t cover here.
References:
Autoencoders:
- https://en.wikipedia.org/wiki/Autoencoder - wikipedia on Autoencoder
- https://www.jmlr.org/papers/volume11/vincent10a/vincent10a.pdf - stacked denoising autoencoders by Y.Bengio group
- https://www.researchgate.net/profile/Abir_Alobaid/post/To_learn_a_probability_density_function_by_using_neural_network_can_we_first_estimate_density_using_nonparametric_methods_then_train_the_network/attachment/59d6450279197b80779a031e/AS:451263696510979@1484601057779/download/NL+PCA+by+using+ANN.pdf
- https://cedar.buffalo.edu/~srihari/CSE676/14.2%20Denoising%20Autoencoders.pdf - presentation on denoising autoencoders
- https://www.researchgate.net/publication/272086159_Static_hand_gesture_recognition_using_stacked_Denoising_Sparse_Autoencoders
- https://arxiv.org/pdf/1511.06406.pdf - denoising VAE (DVAE) by Y. Bengio et al.
Bayesian ML, VAE and variants:
- https://www.stats.ox.ac.uk/~teh/research/compstats/WelTeh2011a.pdf - Bayesian Learning in Stochastic Gradient Langevin Dynamics by M.Welling, Y.W.Teh
- https://gregorygundersen.com/blog/2021/04/16/variational-inference/ - Gregory Gundersen on Variational Inference (VI)
- https://gregorygundersen.com/blog/2019/11/10/em/ - Gregory Gunderson on Variational EM
- https://towardsdatascience.com/difference-between-autoencoder-ae-and-variational-autoencoder-vae-ed7be1c038f2 - blog post by Aqeel Anwar on VAE with good images
- https://chrischoy.github.io/research/Expectation-Maximization-and-Variational-Inference/ - blog post on VI and Variational EM
- https://www.youtube.com/watch?v=xH1mBw3tb_c - 2019 lecture by D. Vetrov on variational inference
- https://arxiv.org/pdf/1312.6114.pdf - VAE paper by D. Kingma and M. Welling
- https://www.youtube.com/watch?v=9zKuYvjFFS8 - video on AE and VAEs
- https://arxiv.org/pdf/1606.05328.pdf - pixelCNN encoder paper
- https://arxiv.org/pdf/1711.00937.pdf - VQ-VAE paper
- https://arxiv.org/pdf/1812.02833.pdf - disentanglement in VAE paper
- https://arxiv.org/pdf/2110.03318.pdf - on detecting holes in VAE latent space
- https://pyro.ai/examples/svi_part_i.html - implementations of Stochastic VI, VAE etc. in Pyro library
- https://ai.stackexchange.com/questions/8885/why-is-the-variational-auto-encoders-output-blurred-while-gans-output-is-crisp - on blurred outputs of VAE
- https://datascience.stackexchange.com/questions/48962/what-is-posterior-collapse-phenomenon - on posterior collapse
- https://stats.stackexchange.com/questions/347378/variational-autoencoder-why-reconstruction-term-is-same-to-square-loss - on practical aspects of VAE loss
- https://openreview.net/pdf?id=r1xaVLUYuE - Posterior Collapse in VAE paper
- https://www.youtube.com/watch?v=oHtqlRIsXcQ - a talk on Posterior Collapse by the same author as the paper above
- https://www.robots.ox.ac.uk/~cvrg/hilary2006/ppca.pdf - on pPCA (used to understand posterior collapse)
- https://www.tensorflow.org/probability/examples/Probabilistic_PCA - Tensorflow pPCA tutorial
- https://arxiv.org/pdf/1907.06845.pdf - on Bernoulli posterior in VAE
- https://avandekleut.github.io/vae/ - a great blog post on AE and VAE

Written by Boris Burkov who lives in Moscow, Russia, loves to take part in development of cutting-edge technologies, reflects on how the world works and admires the giants of the past. You can follow me in Telegram